
PQArt机器人离线编程软件免费下载 v7.0.0.4054 企业版
大小:170 GB更新日期:2026-04-19 20:50:05.000
类别:编程工具
 228
228 38
38反馈投诉
分类
大小:170 GB更新日期:2026-04-19 20:50:05.000
类别:编程工具
22838

PQArt是一款非常好用的机器人离线编程仿真软件,为用户提供非常方便的一站式编程功能,帮助用户轻松解决各种机器人编程问题,让每一位用户可以体验到最轻松的机器人编程方法。而且PQArt企业版还为用户提供模拟仿真功能,让用户可以通过模拟测试来运行机器人编程,避免产生不必要的浪费。
PQArt机器人离线编程软件更是拥有非常友好的操作界面,让用户可以轻松上手进行操作,快速编写机器人程序,有兴趣的用户快来本站下载这款软件吧。
轨迹生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适合您!
可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设计和轨迹规划更加真实高效。
外部工具
机器人工作方式常见的有以下两种:
1. 手持工具,零件固定;
2. 手持零件,工具固定;
第二种成为外部工具,变成更复杂。PQArt提供了外部工具、变位工具、连续TCP、工件坐标系等配合使用,使手持零件不再复杂。
碰撞检测
仿真时,开启碰撞检测功能,可以模拟检测出机器人在运动时和周边的零部件、设施的碰撞情况,并通过高亮线和输出碰撞信息加以提示。
轨迹优化处理
可把轨迹中的奇异点、轴限位、不可达、碰撞等信息反映在界面上,通过鼠标拖动自动避让,快速获得理想轨迹,提高工作效率。
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改每个机器人之间的目标位置控制点。
1、支持工件校准功能,能够根据真实情况与理论模型的参数误差自动调整轨迹参数。
2、支持多种格式的三维CAD模型,可导入扩展名为STEP、IGS、STL、x_t、prt(UG)、prt(ProE)等格式。
3、可视化轨迹优化和机器人姿态优化功能。
4、包括焊接、喷涂、去毛刺、数控加工等多种工艺包。
5、支持多种品牌工业机器人离线编程操作,可导入本体模型,控制各轴运动,仿真运行设计的轨迹(例ABB、KUKA、Staubli、广州数控等)。
6、支持自由组装、设计机器人,学习机器人原理与运动过程。

1、首先用户在本站下载PQArt压缩包
2、然后使用解压功能将压缩包打开,双击主程序即可进行安装,弹出程序安装界面

3、同意上述协议条款,然后继续安装应用程序,点击同意按钮即可
4、可以根据自己的需要点击浏览按钮将应用程序的安装路径进行更改
5、弹出应用程序安装进度条加载界面,只需要等待加载完成即可
6、根据提示点击安装,弹出程序安装完成界面,点击完成按钮即可
1.基本后置介绍及流程
位置:位于【机器人编程】下的【基础编程】中。

说明:“后置”功能将在软件中生成的轨迹、坐标系等一系列信息生成机器人可执行的代码语言,可以拷贝到示教器控制真机运行。
后置处理界面介绍
单击基础编程中的【后置】,弹出“后置处理”的对话框:
缩进设置
缩进设置主要是编辑后置文件的格式,这个一般选择默认的【空格】。
机器人末端后置和工具末端后置
这两个是选择输出的代码以机器人末端坐标(法兰坐标系)为准还是以工具末端坐标为准。
轨迹点命名
轨迹点命名由前缀和编号组成,这个根据个人喜好进行设置,一般也会选择在这个界面选择默认的选项。
有时在后置时,需要将一条轨迹(假设有90个点)拆开导出或保存,可以将轨迹前半部分(假设有49个点)的第一点编号设置为1,后半部分的第一点编号可以设置为50.
程序名称
程序的名称可自行输入和修改。一般来说,该名称为示教器所识别的模块名称。
使用注释
注释是指解释代码语言的文字。
是否使用注释根据需要设定。
后置代码编辑器
点击【生成文件】后,弹出后置代码编辑器,生成的代码如下:
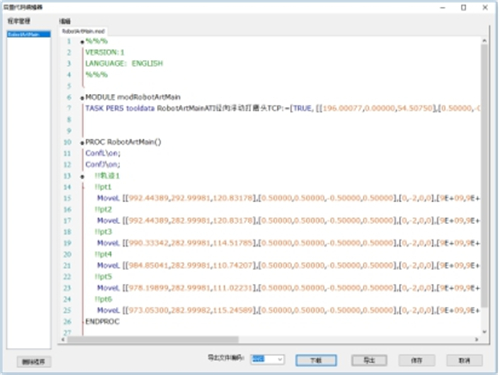
不同的机器人后置会生成不同的文件格式.KUKA机器人会后置出两个文件:DAT/SRC.其他机器人会后置出一个后缀为mod的文件。
后置代码的显示方式:点的坐标、字符和注释用不同颜色区别开来,代码查看起来清晰明了。
有行号显示,方便定位某一行的代码。
折叠功能,同一组别或者段落的代码可以实现手动折叠展开和收起。
导出文件编码:包括ANSI和UTF-8两种编码。ANSI编码不支持代码程序中包含中文字符,UTF-8则允许包含中文字符,从而根据特定品牌的机器的后置需求来选择这两种编码。
ANSI详细讲解:ANSI
UTF-8详细讲解:UTF-8
导出:将后置出的文件直接拷贝到真实示教器,从而完成真机的运行。
保存:后置代码会保存在编辑器中。
后置格式的具体显示样式,如字体颜色、背景色、折叠方式等都用XM控制。
因此,用户可依据实际需求,自定义后置的具体显示样式。
2.自定义后置
位置:位于【自定义】下的【后置】中。

说明:自定义后置,即自定义机器人的后置代码,大幅度增加了后置代码书写排列的灵活性,满足多种后置需求。自定义后置一般与自定义机器人相关联。自定义机器人时需选择后置类型,将自定义的后置 文件导入,即可为自定义的机器人设置后置格式。
该功能位于【机器人编程】下的【场景搭建】中。
插入官方机器人模型:通过机器人的“品牌”、“主要应用”、“负载”、“工作域”和“轴数”等条件来筛选出所需机器人的型号;通过搜索来直接插入目标机器人;
点击界面中的机器人图片,会显示出机器人的相关参数:负载、工作范围、轴数、主要应用等;“看了又看”中提供的是与所选机器人参数相似的机器人型号。
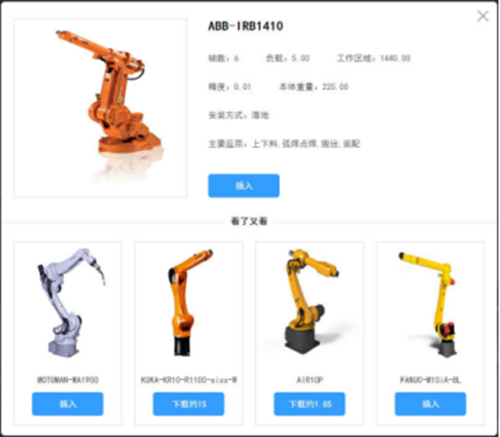
PQArt支持自定义通用六轴机器人、非球型六轴机器人以及SCARA机器人,在市场上存在多种机器人品牌和型号的情况下,最大限度满足市场需求。
PQArt(原RobotArt)是我国拥有自主知识产权的工业机器人离线编程软件。公司旗下的“华航筑梦”是以工业机器人为核心的智能制造领域线上服务平台,提供人才学习、认证培训、招聘就业以及相关工业软件服务。PQArt是系列工业软件中核心产品之一,始于2013年,经过多年的研发与应用,PQArt掌握了多项核心技术,包括3D平台、几何拓扑、特征驱动、自适应求解算法、开放后置、碰撞检测、代码仿真等。它的功能覆盖了机器人集成应用完整的生命周期,包括方案设计、设备选型、集成调试及产品改型,累计已有4万多人使用PQArt进行学习或工作。
在人才培养领域,有大量在校学生以PQArt虚拟仿真与离线编程为入口开始自己的机器人学习与从业生涯。同时,PQArt也为教育部中职、高职机器人相关赛项提供技术支持,选手们在PQArt软件中一展自己的才华。
相关下载

AAuto Quicker(快手)官方中文版下载 v32.9.1 最新版2.3M | v1.25
下载
android sdk开发工具最新版本下载 v22.6.2 中文版2.3M | v1.25
下载
exe易容大师文件修改编辑器中文版下载 v1.2 免费版2.3M | v1.25
下载
SX HTML5VIP免费版下载 v2.60 官方版2.3M | v1.25
下载
HBuilderX编辑器官方版下载 v3.1.4.20210305 最新版2.3M | v1.25
下载
Emurasoft(EmEditor)免费下载 v20.6.0 便携注册版2.3M | v1.25
下载
Typora官方电脑版下载 v0.9.98 最新版2.3M | v1.25
下载
tomcat10最新版本下载 v10.0.0 官方版2.3M | v1.25
下载
obsidian软件下载 v0.8.4 中文版2.3M | v1.25
下载
Element-UI组件库官方下载 v2.9.0 最新版本2.3M | v1.25
下载 Notepad++(代码编辑器)下载 v7.9.5 官方中文版
Notepad++(代码编辑器)下载 v7.9.5 官方中文版 蓝鸟中文编程官方电脑版下载 v3.4.1 最新版
蓝鸟中文编程官方电脑版下载 v3.4.1 最新版 aardio最新官方版下载 v32.14.1 正式版
aardio最新官方版下载 v32.14.1 正式版 Site Designer官方版免费下载 v4.0.3285 电脑版
Site Designer官方版免费下载 v4.0.3285 电脑版 Visual C++中文版下载 v6.0 企业版
Visual C++中文版下载 v6.0 企业版 三菱PLC编程软件下载 v8.86 官方正式版
三菱PLC编程软件下载 v8.86 官方正式版 Microsoft .NET Framework中文版官方下载 v4.5.5 纯净版
Microsoft .NET Framework中文版官方下载 v4.5.5 纯净版 Python编程中文版下载 v3.9.2 最新版
Python编程中文版下载 v3.9.2 最新版 一鹤快手编程软件中文版下载 v32.9.1 绿色免费版
一鹤快手编程软件中文版下载 v32.9.1 绿色免费版
山东潍坊联通 网友 夜之潘多拉
下载挺快的
天津移动 网友 一剑倾城
支持支持!
新疆乌鲁木齐电信 网友 当时明月在
玩了半天有点累,休息下来评论下
河南平顶山移动 网友 梵音战阁
废话,非常好玩。
陕西西安电信 网友 至少、还有你
还在研究游戏中,很多功能不会玩~~